Solutions to elementary discrete dynamical systems problems
The following is a set of solutions to the elementary discrete dynamical systems problems. Let us know if you have a better solution.
Problem 1
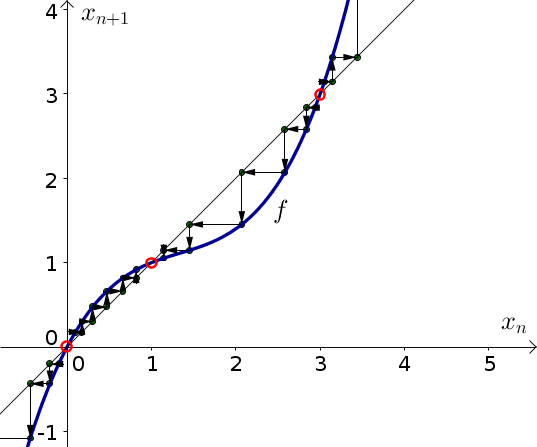
- The equilibria are indicated by the three open red circles in the below graph. The equilibria are $E=0$, $E=1$, and $E=3$. In each case, if $x_n=E$, then, $x_{n+1}=E$.
- According the below cobwebbing, trajectories move away from the equilibrium $E=0$, so this equilibrium is unstable. Trajectories move toward the equilibrium $E=1$, so this equilibrium is stable. Trajectories move away from the equilibrium $E=3$, so this equilibrium is unstable.
Problem 2
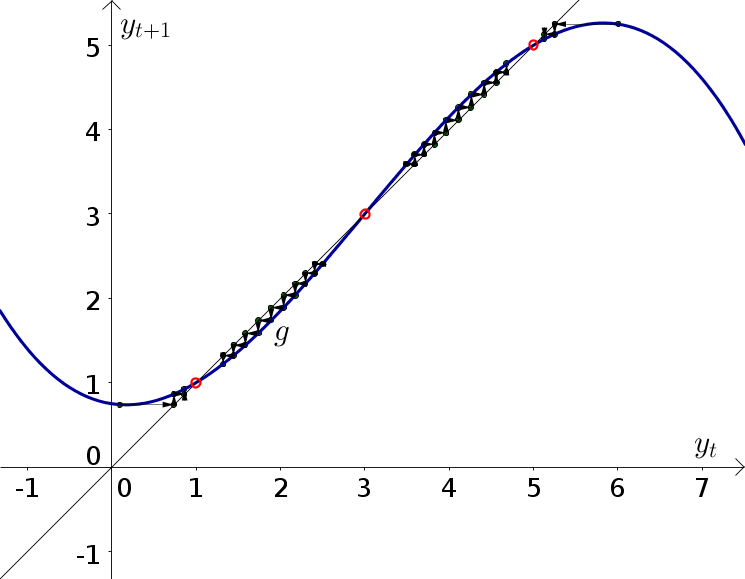
- The equilibria are the three open red circles in the below graph. They are $E=1$, $E=3$, and $E=5$.
- According the below cobwebbing, trajectories move toward the equilibrium $E=1$, so this equilibrium is stable. Trajectories move away from the equilibrium $E=3$, so this equilibrium is unstable. Trajectories move toward the equilibrium $E=5$, so this equilibrium is stable.
Problem 3
Let $E$ denote an equilibrium. To find the equilibria, we plug in $q_{t+1}=E$ and $q_t=E$. Then we solve for $E$. \begin{align*} E - E &= \frac{a E +b}{c}\\ 0 &= \frac{a E +b}{c}\\ 0 &= a E +b \end{align*}
If $a \ne 0$, then we can divide by $a$ to determine that the unique equilibrium is \begin{align*} E= -\frac{b}{a} \end{align*}
If, on the other hand $a=0$, then we cannot divide by $a$. To determine the equilibria when $a=0$, we have to break the result up into cases depending on the value of $b$. If $b \ne 0$, then the equation $-aE = b$ can never be satisfied, since the left hand side is zero and then right hand side is non-zero, no matter the value of the equilibrium $E$. In this case, there are no equilibria. If $b=0$ along with $a=0$, then both sides of the equation $-a E = b$ are zero, no matter the value of $E$. In this case, any value of $E$ satisfies the equation and is an equilibrium. We conclude that if $a=0$, there are either no equilibria (if $b \ne 0$) or an infinite number of equilibria (if $b=0$).
Problem 4
Let $E$ denote an equilibrium. To find the equilibria, we plug in $m_{n+1}=E$ and $m_n=E$. Then we solve for $E$. \begin{align*} E - E &= \frac{b E +c}{d}\\ 0 &= \frac{b E +c}{d}\\ 0 &= b E +c\\ \end{align*}
If $b \ne 0$, then we can divide by $b$ to determine that the unique equilibrium is \begin{align*} E= -\frac{c}{b} \end{align*}
If, on the other hand $b=0$, then we cannot divide by $b$. To determine the equilibria when $b=0$, we have to break the result up into cases depending on the value of $c$. If $c \ne 0$, then the equation $-bE = c$ can never be satisfied, since the left hand side is zero and then right hand side is non-zero, no matter the value of the equilibrium $E$. In this case, there are no equilibria. If $c=0$ along with $b=0$, then both sides of the equation $-b E = c$ are zero, no matter the value of $E$. In this case, any value of $E$ satisfies the equation and is an equilibrium. We conclude that if $b=0$, there are either no equilibria (if $c \ne 0$) or an infinite number of equilibria (if $c=0$).
Problem 5
Let $E$ denote an equilibrium. To find the equilibria, we plug in $r_{t+1}=E$ and $r_t=E$. Then we solve for $E$. \begin{align*} E &= \frac{a E+b}{c}\\ cE &= aE +b\\ (c-a)E &=b \end{align*}
If $c \ne a$, then $c-a \ne 0$ and we can divide by $c-a$ to determine that the unique equilibrium is \begin{align*} E= \frac{b}{c-a} \end{align*}
If, on the other hand $c=a$, then we cannot divide by $c-a=0$. To determine the equilibria when $c=a$, we have to break the result up into cases depending on the value of $b$. If $b \ne 0$, then the equation $(c-a)E = b$ can never be satisfied, since the left hand side is zero and then right hand side is non-zero, no matter the value of the equilibrium $E$. In this case, there are no equilibria. If $b=0$ along with $c=a$, then both sides of the equation $(c-a) E = b$ are zero, no matter the value of $E$. In this case, any value of $E$ satisfies the equation and is an equilibrium. We conclude that if $c=a$, there are either no equilibria (if $b \ne 0$) or an infinite number of equilibria (if $b=0$).
Problem 6
Let $E$ denote an equilibrium. To find the equilibria, we plug in $c_{t+1}=E$ and $c_t=E$. Then we solve for $E$. \begin{align*} E - E &= \frac{(E-a)(E-b)}{d}\\ 0 &= (E-a)(E-b)\\ E &= a \quad \text{or} \quad E=b \end{align*}
Problem 7
Let $E$ denote an equilibrium. To find the equilibria, we plug in $b_{n+1}=E$ and $b_n=E$. Then we solve for $E$. \begin{align*} E - E &= \frac{(E -\alpha)(E-\beta)(E-\gamma)}{\delta}\\ 0 &= (E -\alpha)(E-\beta)(E-\gamma)\\ E &= \alpha, \quad E=\beta, \quad \text{or} \quad E=\gamma \end{align*}
Problem 8
- If one doubles the parameter $a$ and doubles the parameter $b$, the expression $\frac{a}{b}$ is unchanged. Since $a$ and $b$ appear in the dynamical system only in the combination, $\frac{a}{b}$, the dynamical system is unchanged.
- Since $a$ and $b$ appear in the dynamical system only in the combination of $\lambda$, the evolution of the dynamical system is determined once the value of the $\lambda$ is given. Given $\lambda$, the individual values of $a$ and $b$ don't matter.
- In terms of just $\lambda$ and $c$, the dynamical system is \begin{align*} m_{t+1} - m_t = -\lambda m_t + \lambda c, \quad \text{for $t=0,1,2,3, \ldots$ } \end{align*} where $\lambda$ and $c$ are parameters.
Problem 9
- The parameters $a$, $b$, and $c$ appear in the dynamical system only through the combination $\frac{ab}{c}$, so if that combination is fixed, the dynamical system is unchanged. Since the combination doesn't change when doubling both $a$ and $c$, the dynamical system is unchanged.
- Since the critical combination of parameters $\frac{ab}{c}$ doesn't change when doubling both $b$ and $c$, the dynamical system is unchanged.
- Since the critical combination of parameters $\frac{ab}{c}$ doesn't change when doubling $a$ and halving $b$, the dynamical system is unchanged.
- Since the parameters $a$, $b$, and $c$ appear in the dynamical system only through the combination $\gamma = \frac{ab}{c}$, the evolution of the dynamical system is determined once the value of the $\gamma$ is given. Given $\gamma$, the individual values of $a$, $b$, and $c$ don't matter.
- In terms of just $\gamma$, the dynamical system is \begin{align*} l_{n+1} = \gamma l_n e^{-l_n\gamma}, \quad \text{for $n=0,1,2,3, \ldots$ } \end{align*} where $\gamma$ is a parameter.
Problem 10
An equilibrium of a dynamical system is a value of the state variables where the state variables do not change. This means if the systems starts at an equilibrium, the state will remain at the equilibrium forever.
An equilibrium is stable if solutions that begin near the equilibrium stay near, or approach, the equilibrium. An equilibrium is unstable if some solutions that begin near the equilibrium move away from the equilibrium.
Problem 11
- Let $E$ denote an equilibrium. Setting $h_{t+1}=E$ and $h_t=E$, we solve for $E$: \begin{align*} E - E &= \frac{E(E -1)}{2}\\ 0 &= E(E-1)\\ E &= 0 \quad \text{or} \quad E=1 \end{align*}
- If $h_0 = -0.1$, then \begin{align*} h_1 &= -0.1-0.1(-0.1-1)/2=-0.045\\ h_2 &= -0.045-0.045(-0.045-1)/2 \approx -0.02149\\ h_3 &\approx -0.02149-0.02149(-0.02149-1)/2 \approx -0.01051\\ h_4 &\approx -0.01051-0.01051(-0.01051-1)/2 \approx -0.005201 \end{align*}
- If $h_0 = 0.1$, then \begin{align*} h_1 &= 0.055\\ h_2 &\approx 0.02901\\ h_3 &\approx 0.01493\\ h_4 &\approx 0.007575 \end{align*}
- Both the solution (or trajectory) that started just above the equilibrium $E=0$ and the one that started just below are getting close to the equilibrium. Therefore, the equilibrium appears to be stable.
- If $h_0 = 0.99$ \begin{align*} h_1 &\approx 0.9851\\ h_2 &\approx 0.9777\\ h_3 &\approx 0.9668\\ h_4 &\approx 0.9507 \end{align*}
- If $h_0 = 1.01$ \begin{align*} h_1 &\approx 1.0151\\ h_2 &\approx 1.0227\\ h_3 &\approx 1.0343\\ h_4 &\approx 1.0520 \end{align*}
- The solutions (or trajectories) started near the equilibrium $E=1$ but are moving away from the equilibrium. Therefore, the equilibrium appears to be unstable.
Problem 12
- Let $E$ denote an equilibrium. Setting $S_{t+1}=E$ and $S_t=E$, we solve for $E$: \begin{align*} E - E &= \frac{E(1 -E)}{2}\\ 0 &= E(1-E)\\ E &= 0 \quad \text{or} \quad E=1 \end{align*}
- If $S_0 = -0.01$, \begin{align*} S_1 &= -0.01-0.01(1+0.01)/2 = -0.155\\ S_2 &= -0.155 -0.155(1+ 0.155) \approx -0.2445\\ S_3 &\approx -0.2445-0.2445(1+0.2445)\approx -0.3967\\ S_4 &\approx -0.3967-0.3967(1+0.3967)\approx -0.6737 \end{align*}
- If $S_0= 0.01$, \begin{align*} S_1 &=0.145\\ S_2 &\approx 0.2070\\ S_3 &\approx 0.2891\\ S_4 &\approx 0.3918 \end{align*}
- The solutions (or trajectories) started near the equilibrium $E=0$ but are moving away from the equilibrium. Therefore, the equilibrium appears to be unstable.
- If $S_0 = 0.9$, \begin{align*} S_1 &= 0.945 \\ S_2 &\approx 0.9710 \\ S_3 &\approx 0.9851\\ S_4 &\approx 0.9924 \end{align*}
- If $S_0= 1.1$, \begin{align*} S_1 &=1.045 \\ S_2 &\approx 1.0215\\ S_3 &\approx 1.0105\\ S_4 &\approx 1.0052 \end{align*}
- Both the solution (or trajectory) that started just above the equilibrium $E=1$ and the one that started just below are getting close to the equilibrium. Therefore, the equilibrium appears to be stable.
Problem 13
We can rewrite the systems, adding $q_n$ to both sides and combining the two $q_n$ terms on the right hand side. The new form is \begin{align*} q_{n+1} &= (1+a) q_n \quad \text{for $n=0,1,2,3, \ldots$ } \end{align*} Now it's is easy to see that in each step, we multiply by $1+a$. The solution is \begin{align*} q_n &= (1+a)^n q_0. \end{align*} This expression is written just in terms of the initial condition $q_0$, the parameter $a$, and the number $n$, as required, so we call this the solution of the dynamical system.
Let $E$ denote an equilibrium. Using the original form of the equation, we calculate that $E$ must satisfy \begin{align*} E-E=aE \end{align*} or \begin{align*} 0=aE. \end{align*} This equation is satisfied if either $a=0$ or $E=0$. Therefore, if $a=0$, any value of $q_n$ is an equilibrium. But, if $a \ne 0$, then the only equilibrium is $E=0$.
In the case where $a=0$, the value of $q_n$ never changes. A solution that starts near an equilibrium does stay near the equilibrium (it doesn't move), so by our definition, we'd have to say all the equilibria are stable when $a=0$.
If $-1 \le a < 0$, then $(1+a)^n$ gets smaller as $n$ increases, so the solution approach the equilibrium $E=0$. The equilibrium is stable.
If $a > 0$, then $(1+a)^n$ increases and $n$ increases, so the solution moves away from the equilibrium as long as the initial condition $q_0$ is not zero. The equilibrium is unstable.
If $-2 < a < -1$, then $-1 < 1+a < 0$. The value of $(1+a)^n$ gets smaller in absolute value as $n$ increases. The quantity $(1+a)^n$ does switch sign each time $n$ increases by 1, but $|(1+a)^n|$ goes steadily to zero. The equilibrium is stable.
If $a < -2$, then $1+a<-1$. The value of $(1+a)^n$ gets larger in absolute value as $n$ incresaes. The quantity $(1+a)^n$ does switch sign each time $n$ increases by 1, but $|(1+a)^n|$ gets steadily larger. The equilibrium is unstable.
Problem 14
In each step, we multiply by the number $b$. The solution of the dynamical system is \begin{align*} p_n = b^np_0. \end{align*} This expression is written just in terms of the initial condition $p_0$, the parameter $b$, and the number $n$, as required, so we call this the solution of the dynamical system.
Let $E$ denote an equilibrium. $E$ must satisfy \begin{align*} E=bE \end{align*} or, subtracting $E$ from both sides and factoring, the condition is \begin{align*} 0=(b-1)E. \end{align*} This equation is satisfied if either $b=1$ or $E=0$. Therefore, if $b=1$, any value of $p_n$ is an equilibrium. But, if $b \ne 1$, then the only equilibrium is $E=0$.
In the case where $b=1$, the value of $p_n$ never changes. A solution that starts near an equilibrium does stay near the equilibrium (it doesn't move), so by our definition, we'd have to say all the equilibria are stable when $b=1$.
If $0 \le a < 1$, then $b^n$ gets smaller as $n$ increases, so the solution approach the equilibrium $E=0$. The equilibrium is stable.
If $b > 1$, then $b^n$ increases and $n$ increases, so the solution moves away from the equilibrium as long as the initial condition $p_0$ is not zero. The equilibrium is unstable.
If $-1 < b < 0$, the value of $b^n$ gets smaller in absolute value as $n$ increases. The quantity $b^n$ does switch sign each time $n$ increases by 1, but $|b^n|$ goes steadily to zero. The equilibrium is stable.
If $b<-1$, the value of $b^n$ gets larger in absolute value as $n$ incresaes. The quantity $b^n$ does switch sign each time $n$ increases by 1, but $|b^n|$ gets steadily larger. The equilibrium is unstable.
Thread navigation
Elementary dynamical systems
Similar pages
- The idea of a dynamical system
- An introduction to discrete dynamical systems
- Developing an initial model to describe bacteria growth
- Bacteria growth model exercises
- Bacteria growth model exercise answers
- Exponential growth and decay modeled by discrete dynamical systems
- Discrete exponential growth and decay exercises
- Discrete exponential growth and decay exercise answers
- Doubling time and half-life of exponential growth and decay
- Constructing a mathematical model for penicillin clearance
- More similar pages